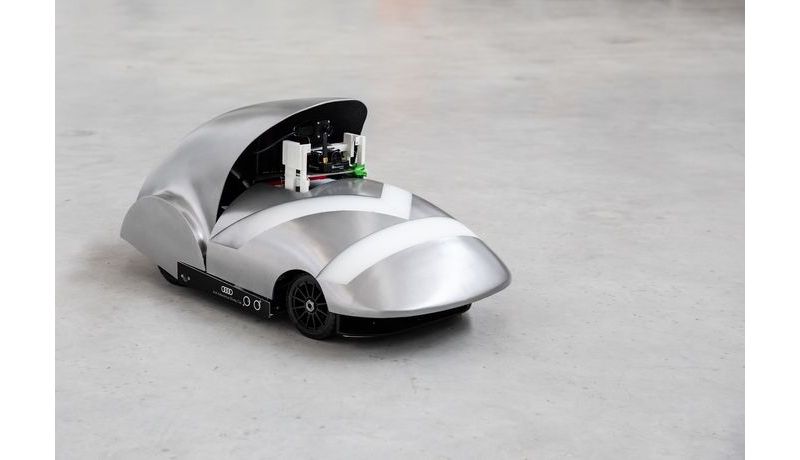
Titled K (named after Johannes Kepler), the interdisciplinary project team is developing an intelligent robot model car that can drive fully autonomously and agilely on changing terrain. K can also interact with its environment: it can recognize people and focus on a specific person for 1:1 interaction.
Inner states such as attention or "curiosity" are communicated to the outside world by K via a colored, illuminated shell. In order to correctly assess demanding situations and derive fast driving maneuvers from them, our robot car uses different technologies such as SLAM (Simultaneous Localization and Mapping) and image recognition - the LIT AI Lab and the Audi.JKU Deep Learning Center have achieved great expertise in applying these technologies over the recent years.
In order to make the image processing, which is particularly important for autonomous driving, clear to a broad audience, K optionally sends its camera view and a visual representation of its environment to a screen in real time. Students, pupils and other audience groups can thus not only physically enter the "shared space" with the mobile robot but at the same time have the opportunity to "see through its eyes" and develop a better understanding of modern AI methods.
 © Tom Mesic
K – JKU’s Interactive Robocar at the Ars Electronica Festival 2020
© Tom Mesic
K – JKU’s Interactive Robocar at the Ars Electronica Festival 2020
 © Tom Mesic
K – JKU’s Interactive Robocar reagiert auf Gesten von Menschen
© Tom Mesic
K – JKU’s Interactive Robocar reagiert auf Gesten von Menschen
 © Tom Mesic
© Tom Mesic
 © LIT Robopsychology Lab
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
© LIT Robopsychology Lab
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
 © Tom Mesic
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
© Tom Mesic
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
 © Tom Mesic
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
© Tom Mesic
K – JKU’s Interactive Robocar kommuniziert über Lichtsignale
 "K" will be an intelligent model car that can navigate fully autonomously and communicate states to the outside world by an interactive shell.
"K" will be an intelligent model car that can navigate fully autonomously and communicate states to the outside world by an interactive shell.
Johannes Kepler University Linz
Altenberger Straße 69
4040 Linz, Austria
 Go to JKU Homepage
Go to JKU Homepage
