| Supervisory committee: | Univ.-Prof. Dipl.-Ing. Dr. Bernhard Zagar Univ.-Prof. Dr. Bernhard Jakoby Prof. Dr.-Ing. Gerhard Fischerauer, opens an external URL in a new window |
| Final exam: | April 08, 2024 |
Automated devices and robots have become indispensable in many areas, including industry, medicine, and even private life. The safety aspect is often a factor that should not be neglected. For safe human-robot interaction, it should be possible to localize a permitted direct contact and determine the contact forces. Any unintentional contact between human and robot, no matter how small, should be avoided. In addition to detecting a contact that has already occurred, it is also necessary to monitor approaching actions. This makes it possible to anticipate potential collisions and initiate evasive maneuvers by the robot.
The aim of this work is to develop a distributed sensor system that can simultaneously operate as a proximity sensor with an adjustable measuring range and as a spatially resolving force or pressure sensor. This is achieved by combining resistance and capacitance tomography. The sensor system consists of a suitably structured conductive polymer layer with attached electrodes. The system is designed as a multifunctional, single-layer artificial skin for robots.
To localize an approaching object, the capacitance density distribution on the top layer of the sensor is estimated. The distance and position at which the object is approaching can then be calculated from the capacitance density distribution (see Fig. 1). Resistance tomography, on the other hand, is used to reconstruct the conductivity distribution in the polymer layer. Since the conductivity depends on the deformation of the polymer layer caused by external forces, electrical resistance tomography can be used to obtain spatially resolved force measurements.
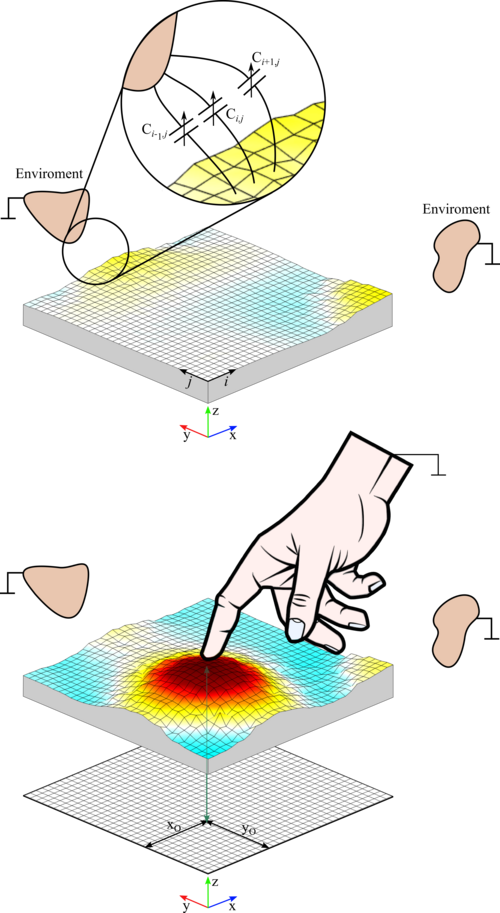 Fig. 1: An approaching object (hand) causes a change in the values of the discrete capacitances in the area of the approach due to the additional capacitive coupling with the reference potential. In capacitance tomography, the capacitance density of each pixel is evaluated and used to localize the object.
Fig. 1: An approaching object (hand) causes a change in the values of the discrete capacitances in the area of the approach due to the additional capacitive coupling with the reference potential. In capacitance tomography, the capacitance density of each pixel is evaluated and used to localize the object.
The hardware developed in this thesis allows to perform electrical capacitance tomography and electrical resistance tomography simultaneously on a sensor system with 16 electrodes. For this purpose, the excitation signal for the capacitance tomography was added to the excitation signal for the resistance tomography. Lock-in amplifiers were used for the measurement. The reconstruction of the capacitance density and conductivity distribution was performed by Newton's one-step-method and Tikhonov regularizations of the inverse problems (see Fig. 2).
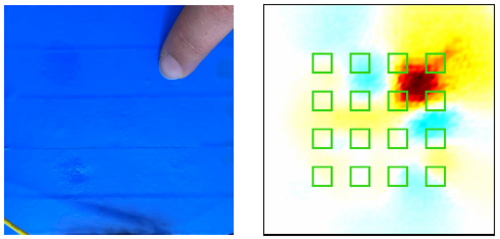 Fig. 2: Result of the reconstruction of the conductivity distribution with a force applied to the sensor by a finger. A positive change in conductivity is indicated by red pixels. The green squares mark the positions of the electrodes.
Fig. 2: Result of the reconstruction of the conductivity distribution with a force applied to the sensor by a finger. A positive change in conductivity is indicated by red pixels. The green squares mark the positions of the electrodes.
Keywords: force localization, distance measurement, impedance tomography
Johannes Kepler University Linz
Altenberger Straße 69
4040 Linz, Austria
 Go to JKU Homepage
Go to JKU Homepage
