
"Developing basic knowledge for future technological development."
The Interaction of Autonomous and Manually-Controlled Vehicles (IAMCV) Dataset contains over 14 hours of data acquired through vehicles sensors in highways, intersections, roundabouts and urban environments. The data is currently being processed and will soon be published.
FWF Project Details
Project number: P 34485
Project lead: Univ. Prof. Dr. Cristina Olaverri-Monreal
Decision board: 08.03.2021
The Interaction of Autonomous and Manually-Controlled Vehicles (IAMCV) Dataset contains over 14 hours of data acquired through vehicles sensors in highways, intersections, roundabouts and urban environments. The data is currently being processed and will soon be published.
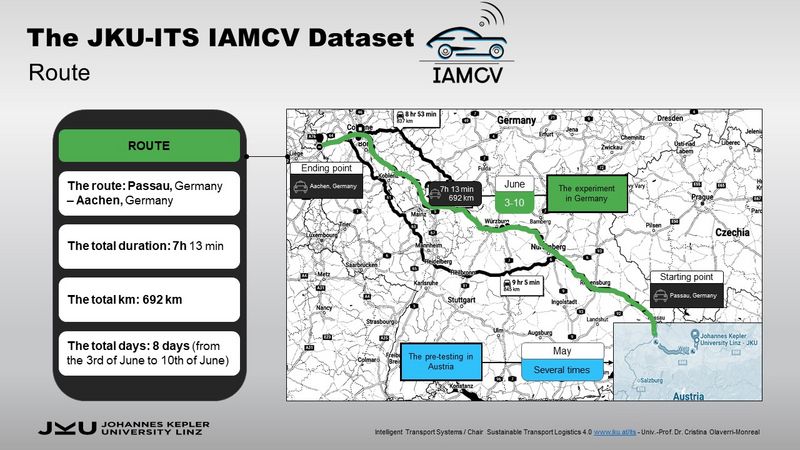
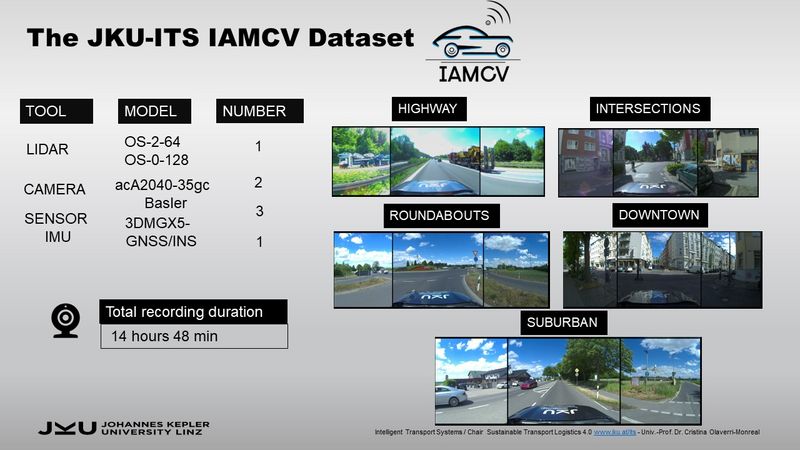


The IAMCV dataset was recorded in June 2022 at daytime, under different natural light levels (sunny, cloudy, or overcast). Since the dataset aimed to record different interactions between the recording vehicle and other vehicles, trucks, motorcycles, and vulnerable road users, the chosen locations were focused on: intersections, roundabouts, roads, and highways.
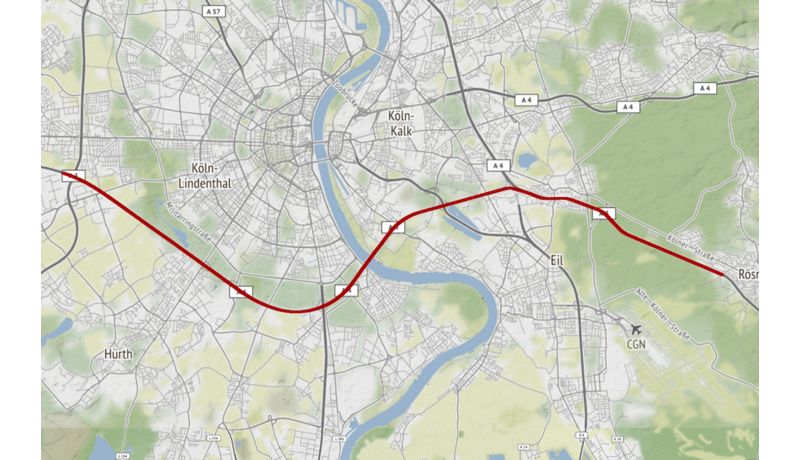
To study intersections in urban areas, three locations were selected inside the city of Aachen in Germany. In the suburban areas around the city, two more locations were chosen for roundabouts and two more for country roads. Finally, the highway locations were selected along the A3 Federal Motorway between Passau and Cologne.
The collected data was anticipated to include various driving patterns and trajectories, contingent upon the specific scenarios and traffic conditions. In the locations selected for intersections and roundabouts analysis, the vehicle traversed the same reference intersection or roundabout several times, thus the followed path resembles loops around the reference point. These driving patterns are particularly useful for loop-closure purposes when testing mapping or localization algorithms.
The IAMCV dataset comprises different types of data:
Regarding the naming, files from cameras and LIDARs were named using the format "nn_sensor_tttttttttt.tttt.ext" as follows:
The dataset will be available at IEEE Dataport, öffnet eine externe URL in einem neuen Fenster.
Johannes Kepler Universität Linz
Altenberger Straße 69
4040 Linz, Österreich
 Zur JKU Startseite
Zur JKU Startseite
