This weave project, öffnet eine externe URL in einem neuen Fenster is a collaboration of four research groups. The Austrian Science Fund, öffnet eine externe URL in einem neuen Fenster (FWF) finances the project for JKU and the national partner UMIT TIROL, öffnet eine externe URL in einem neuen Fenster, with local leaderships by Dr. Nicole Gehring and Prof. Frank Woittennek, respectively. The two proejct leaders Prof. Joachim Deutscher (Ulm University, öffnet eine externe URL in einem neuen Fenster) and Prof. Joachim Rudolph (Saarland University, öffnet eine externe URL in einem neuen Fenster) in Germany receive financing from the German Research Fund, öffnet eine externe URL in einem neuen Fenster (DFG).
FWF project I 6519-N
duration
9/2023 - 8/2026
leader (at JKU)
contributors (at JKU)
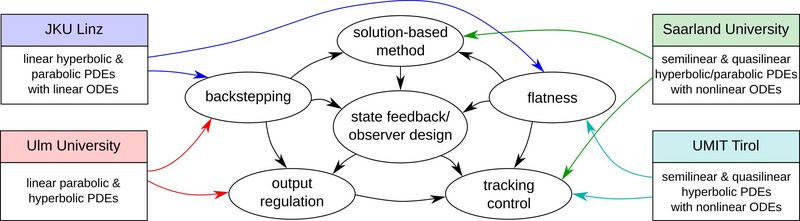
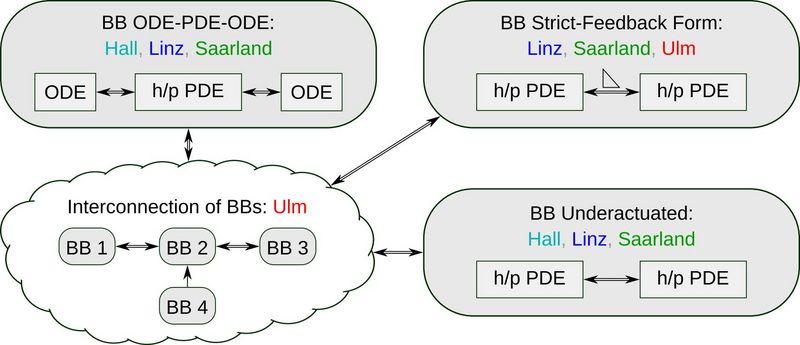
A unified normal form approach is developed for linear and nonlinear distributed-parameter systems (DPSs). To this end, two major current research directions in the control theory for DPSs, the backstepping and the flatness-based approach, are extended to new classes of DPSs. Their mutual relationships are investigated to obtain new general and coherent analysis and synthesis methods. Classes considered comprise hyperbolic and parabolic PDEs with boundary dynamics as well as interconnected partial differential equations (PDEs). Starting from linear systems with linear lumped boundary dynamics, the project successively extends the methods to semilinear and quasilinear PDEs with nonlinear dynamics at the boundaries. Special emphasis is put on coupled PDEs of both hyperbolic and parabolic type and on underactuated systems. These systems are used as building blocks in general interconnections, thus covering more complex dynamical systems, for which new efficient methods are developed to reach a decentralized design. The interconnection of these methods with the normal form approach is shown below.
The focus at JKU is on flatness-based and backstepping-based methods for linear DPSs. For an introduction intro the backstepping and the flatness-based approach for so-called PDE-ODE systems as they arise for hyperbolic PDEs with dynamics boundary conditions, e.g. a heavy rope with a load, see the paper "Control of distributed-parameter systems using normal forms: an introduction", öffnet eine externe URL in einem neuen Fenster (at - Automatisierungstechnik, 2023).
Johannes Kepler Universität Linz
Altenberger Straße 69
4040 Linz, Österreich
 Zur JKU Startseite
Zur JKU Startseite
